
BlueROV2
El BlueROV2 es un ROV submarino de alto rendimiento y altamente personalizable, con un nivel de flexibilidad y ampliabilidad sin precedentes. Está disponible en configuraciones de seis y ocho propulsores, está equipado con software de código abierto y cuenta con una variedad de accesorios para mejorar su funcionalidad. Con miles de unidades en uso, el BlueROV2 es uno de los drones submarinos más populares, capaz de adaptarse tanto a misiones simples como avanzadas.
El BlueROV2 viene parcialmente ensamblado y requiere entre 6 y 8 horas de montaje. Este proceso práctico te proporciona una comprensión más profunda del sistema, facilitando la actualización o modificación de tu ROV a medida que tus necesidades evolucionan.
Cámara de poca luz y luces muy brillante
Una cámara frontal de alta definición (1080p, 30fps) está alojada dentro de la carcasa electrónica del ROV. Esta cámara de gran angular y poca luz está montada en un mecanismo de inclinación, lo que permite al piloto apuntarla hacia arriba o hacia abajo de forma independiente al ROV.
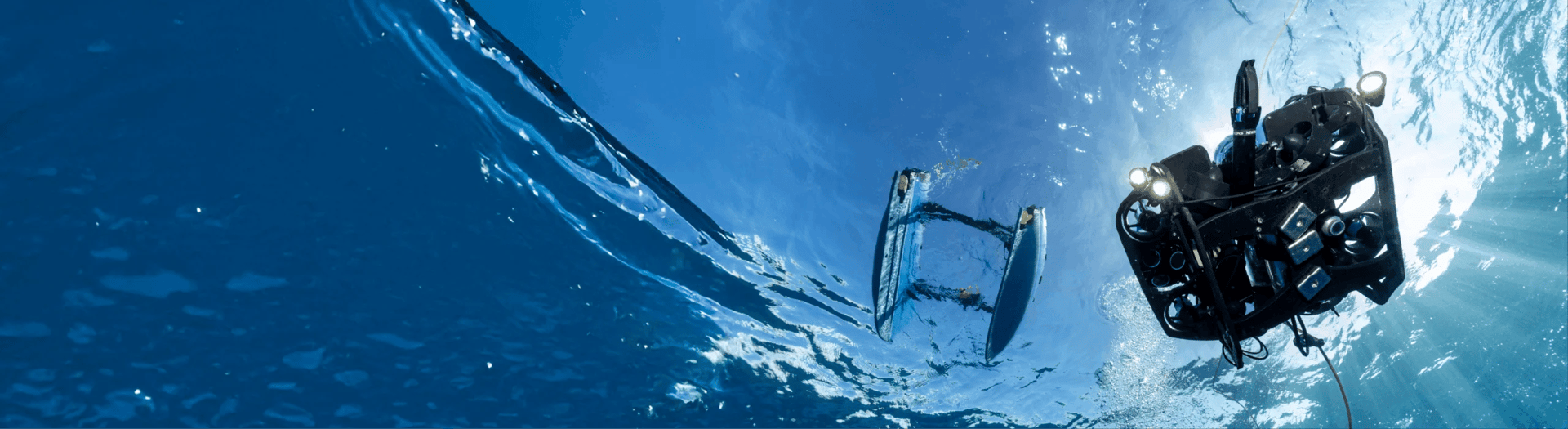
El ROV puede configurarse con dos o cuatro luces lúmenes regulables, que proporcionan hasta 6.000 lúmenes para iluminar las profundidades oceánicas.
Configuración de propulsores vectorizados y el kit pesado
El ROV utiliza los propulsores patentados T200 en una configuración vectorial, proporcionando una alta relación empuje-peso y la capacidad de moverse con precisión en cualquier dirección. El ROV cuenta con seis propulsores pero es ampliable a ocho propulsores con el Heavy Configuration Retrofit Kit, que proporciona un control completo de seis grados de libertad y una mayor estabilidad.
Los ajustes de ganancia en el ROV permiten afinar la respuesta para la tarea, dándote un control preciso a muy bajas velocidades, así como la potencia necesaria para soportar corrientes o cargas pesadas.
Profundidad nominal hasta 300 metros
El BlueROV2 puede configurarse con carcasas de plástico acrílico o aluminio anodizado. Las cajas de acrílico están clasificadas para una profundidad de 100 metros (330 pies), y las de aluminio para una profundidad de 300 metros (985 pies). El ROV está construido con componentes de alta calidad, como nuestras cajas estancas con bloqueo y los penetradores WetLink, y viene con una bomba de prueba de vacío para asegurar que tus cajas estancas sean realmente estancas.
Construye el ROV que necesitas
Diseñado como un ROV de clase trabajadora o de investigación, el BlueROV2 tiene un chasis abierto que lleva los componentes estándar del ROV. Este diseño sencillo es robusto y expandible, lo que facilita la colocación de accesorios adicionales, como una pinza o un sonar de escaneo. También disponemos de un skid para cargas útiles que extiende aún más el chasis, proporcionando más espacio para cargas útiles mayores, como carcasas adicionales para baterías.
El BlueROV2 está diseñado para ser modificado y ampliado. ¡Se puede adaptar para casi cualquier tarea submarina que puedas imaginar! Algunas cosas que hemos visto hacer a nuestros clientes con el BlueROV2:
Búsqueda y recuperación
Investigación ambiental
Inspecciones
Fotogrametría
Erradicación de especies invasoras
Ecoturismo
Plataforma de Desarrollo y Pruebas
Visión por Ordenador
Juguete de bañera (es broma, no hagas eso)
Impulsado por el Navigator y BlueOS
El BlueROV2 está controlado por el controlador de vuelo del Navegador y BlueOS. El Navigator está diseñado y construido para ROVs y otras aplicaciones robóticas. Cuenta con sensores a bordo, incluyendo una unidad de medición inercial (IMU) para medir la orientación, un magnetómetro para medir el rumbo de la brújula y un sensor de fugas para alertarte de cualquier entrada de agua. Tiene 16 salidas que se pueden conectar a propulsores, luces, agarradores y otros accesorios, además de mucho contenido serial e I2Puertos C para comunicarse con sensores y sonares. ¡Tiene mucho espacio para expandirse!
El Navigator está acoplado a un ordenador Raspberry Pi 4, que gestiona todos los requisitos de procesamiento y computación dentro del ROV. Ejecuta nuestro software de código abierto BlueOS que proporciona las herramientas y características necesarias para operar y expandir el vehículo. BlueOS ejecuta el software de control de vehículos ArduSub, gestiona la cámara y la conexión de cable, y facilita la instalación de extensiones para añadir nuevas funciones. BlueOS está en constante mejora y las nuevas capacidades seguirán desplegándose en todos los BlueROV2.
En la superficie, el piloto controla el ROV con un mando y un portátil que ejecuta Cockpit, nuestra estación de control terrestre de código abierto. Cockpit es una interfaz de usuario altamente personalizable para el control del vehículo, vídeo en vivo y datos de sensores.
Configuración de tu kit
El BlueROV2 está diseñado para casi todo el mundo, desde operadores primerizos hasta profesionales experimentados. Puedes configurar tu kit con las herramientas y características que mejor se adapten a tu misión. Aquí tienes un desglose de cada opción:
Configuración de los tubos – Elige aluminio para una profundidad de 300 m o acrílico para una profundidad de 100 m.
Actualización de configuración pesada – Añade dos propulsores y más flotabilidad para mayor estabilidad y capacidad de carga útil.
Tether – Disponible en versiones estándar y delgadas, con longitudes de 25 a 300 metros. La longitud que elijas depende de la profundidad y la distancia que quieras llegar. Para longitudes superiores a 50 metros, recomendaríamos el carrete Fathom para facilitar su manejo.
Luces – Disponibles en configuraciones de 2 o 4 luces. Si planeas trabajar mucho en condiciones de poca iluminación o de noche, recomendamos la configuración de 4 luces.
Bobina de amarre – Facilita el transporte y el uso del cable de ancla. El tamaño estándar del carrete permite hasta 150 m de amarre estándar o 200 m de cable delgado. Consigue el tamaño grande para anclajes más largos.
Mando de GamePad – Nos gusta mucho el mando inalámbrico de Xbox, pero muchos otros mandos también funcionan.
Sonares – Pueden ayudar en la navegación y localización de objetos bajo el agua. Para saber más, consulta nuestra Guía del Operador Suave para Sonares y Dispositivos Acústicos Submarinos.






Propulsor T200 con penetrador (BlueROV2 de repuesto)
Este T200 viene con un cable algo más corto y un penetrador de cable preinstalado, y es un sustituto directo de los propulsores del BlueROV2. También está incluido en el Kit de Repuestos BlueROV2.







Kit de repuestos BlueROV2
Este kit contiene varias piezas de repuesto que son útiles para tener a mano para el BlueROV2. El contenido de este kit se basa en nuestras propias experiencias y debería proporcionarte la mayoría de los reemplazos que puedas necesitar en el terreno.
Interfaz de Anclaje Fathom-X (FXTI)
El FXTI proporciona una carcasa superior sencilla pero flexible para conectar el BlueROV2 a un ordenador. Incluye un convertidor USB a Ethernet y una placa Fathom-X, ¡y ofrece muchas opciones de expansión!
Componentes de repuesto T200
Componentes de repuesto para el propulsor T200, incluyendo el núcleo del propulsor T200, el rotor T200/M200 y la tobera T100/T200.
Accesorios y mejoras
Kit pesado BlueROV2
Este kit mejora un BlueROV2 estándar a la configuración Heavy. Añade dos propulsores verticales, protectores externos de propulsores y espuma adicional de flotabilidad para mejorar la estabilidad, aumentar el empuje vertical y permitir un control total de 6 grados de libertad con estabilización activa de cabeceo y balanceo. Requiere el uso de dos agujeros penetradores adicionales en la carcasa principal.
¡BlueROV2 no está incluido!








Sonar de imagen de escaneo Ping360
El Blue Robotics Ping360 es un sonar mecánico de escaneo para navegación e imagen. Tiene un alcance de 50 metros (165 pies), una profundidad nominal de 300 metros (984 pies) y una interfaz de software de código abierto que lo convierte en una herramienta capaz para la navegación ROV y la obtención de imágenes acústicas submarinas.
El Ping360 viene con todo lo necesario para usarse en el BlueROV2
Altímetro de sonar de ping y ecosounder
El sonar Ping es un ecosonda de haz único que mide distancias de hasta 100 metros bajo el agua. Un ancho de haz de 25 grados, una profundidad nominal de 300 metros y una interfaz de software de código abierto la convierten en una herramienta poderosa para la robótica marina. Puede conectarse directamente al controlador de vuelo Navigator. Para conexiones USB, recomendamos conectarse con el adaptador BLUART USB a serie y RS485.
Servicios
Exploración marina con ROVs en Ensenada.
Contacto
Ubicación
+52 646 343 6428
© 2025. All rights reserved.